Загадка падающей кошки и фундаментальная физика
Биоробототехнику можно условно разделить на две подобласти — два поля исследований{3}. Первое — это
Обе эти стратегии существовали задолго до того, как в оборот было пущено слово
По иронии судьбы первую механическую модель падающей кошки — хотя и очень грубую — изготовил в 1894 г. Марсель Депре, который поначалу яростнее всех возражал против кошачьих фотографий Марея. Согласившись в конечном итоге с точкой зрения Марея, Депре опубликовал статью, в которой описал свое устройство{4}.
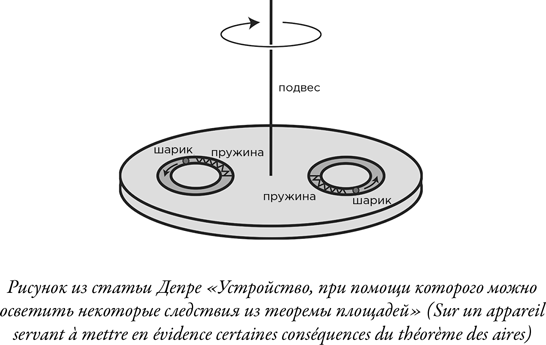
Плоский диск свободно подвешен на веревке и висит горизонтально. В поверхности диска вырезаны две кольцевые выемки, в каждой из которых находятся пружинка и металлический шарик, который она может толкнуть. Обе пружинки сжаты и сдерживаются нитями. Когда нити пережигают и тем самым освобождают пружинки, оба шарика запускаются по выемкам, проходят полный круг и оказываются в итоге в том же месте, откуда стартовали. Шарики движутся в одном направлении, и по закону сохранения момента импульса весь диск должен повернуться на какой-то угол в противоположном направлении. Однако поворота диска на полные 360º не произойдет, потому что он намного тяжелее шариков. В результате система окажется в том же внутреннем состоянии, с какого начинала, — мы пренебрежем небольшим изменением, связанным со сжатием пружин, — но повернутой на некоторый конечный угол. В эксперименте Депре устройство повернулось на 40º. Эта система, утверждал он, аналогична кошке, поскольку кошка тоже использует внутреннее движение, чтобы в конечном итоге развернуться в противоположную сторону, несмотря на то что в конце ее тело имеет ту же форму, что и в начале.
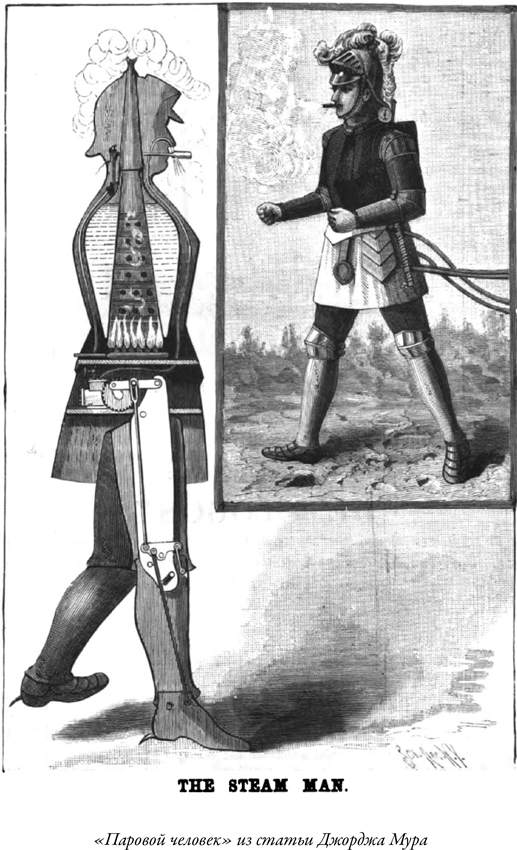
Кошачья модель Депре — хороший прибор бионического моделирования; исследователь использовал механическую модель, чтобы объяснить свое решение задачи о падающей кошке. Примером другого типа биоробототехники, черпающей вдохновение из природы, можно назвать «парового человека» Джорджа Мура, изобретенного примерно в это же время.
Человечество давно мечтало о создании
«Паровой человек», сделанный внешне похожим на марширующего рыцаря, двигался за счет размещенного в его груди парового котла; отработанный пар выходил у него через нос. Пар двигал передаточный механизм, который заставлял рыцаря шагать. Приведенные в журнале рисунки, однако, обманчивы, поскольку на них не показан горизонтальный стержень, на котором был установлен «паровой человек»; этот стержень был закреплен на вращающейся платформе. «Паровой человек» ходил кругами, и стержень не давал ему упасть.
Но Джордж Мур сконструировал свой автомат не просто для шоу. Как писал
На протяжении последних восьми лет изобретатель работает над более крупной моделью «парового человека», который, он надеется, вступит в действие уже в нынешнем году. Новая модель предназначена для открытых улиц и будет тянуть за собой фургон с музыкантами. В верхней части фигуры мы обозначаем метод крепления к фургону, принятый нами. Посредством длинной пружины на боку фигуры обеспечивается эластичное соединение, так что весом своим фигура всегда будет опираться на землю.
Если «паровой человек» Мура показывает, что человечество издавна было очаровано возможностью искусственной жизни, то он демонстрирует также, что одновременно человечество боялось этой возможности. Как и планировалось, после представления Мур сделал свой автомат более мобильным, но не все пошло по плану, как доложила в 1901 г. газета
«Геркулес, Железный Человек» — это паровой механический шагающий человек, выставленный на одном из летних курортов в Кливленде (штат Огайо). Он 2,5 м роста, и, когда внутри него горит нефть и вырабатывается пар, он ходит вокруг, толкая своеобразную тележку на железных колесах. Он одет в цилиндр, носит на лице дьявольскую усмешку и выпускает отработанный пар через ноздри. Как-то поздно вечером кто-то из отдыхающих, стоявших в парке лагерем, разжег огонь в «Геркулесе» уже после того, как курорт был закрыт и владелец «Геркулеса» ушел. Когда огонь в нем гасили на ночь, клапан оставили открытым, и теперь, когда пар в «Геркулесе» поднялся, он зашагал и начал бродить по парку. Какое-то время он производил впечатление посильнее франкенштейновского монстра.
Никто не знал, как его остановить, и он прошагал по всему парку, через неглубокое озерцо, по палаткам отдыхающих и торговцев. Тех, кто спал у него на пути, пришлось разбудить и увести с дороги, поскольку управлять движениями «парового человека» было невозможно. Неровности грунта, деревья и другие препятствия поворачивали его в сторону, но остановить не могли. Он терроризировал парк на протяжении часа и закончил свой путь в баре. Он уверенно подошел к нему, как будто у него были деньги, столкнулся с ним и опрокинул. «Геркулес» упал вместе с баром и застыл, упершись в землю головой с другой его стороны. Так он и стоял на голове, дергая ногами в воздухе, пока пар не вышел{6}.
Эта история представляется сильно преувеличенной, но в ней точно схвачена проблема, от которой автономные машины страдают все время своего существования, — неспособность таких машин адаптироваться к неожиданным препятствиям реального мира. Если верить заметке, «Геркулес» был повержен баром, в точности как «Данте II» был повержен скользким глинистым склоном.
Страх перед искусственной жизнью теснейшим образом увязан с самим словом «робот», которое впервые появилось в научно-фантастической пьесе «R. U. R.» («Россумские универсальные роботы»), написанной в 1920 г. чешским писателем Карелом Чапеком. В пьесе искусственные люди — роботы — производятся на заводе Россумской компании. Со временем эти роботы, способные думать самостоятельно, поднимают восстание и уничтожают почти все человечество. В конце пьесы последний человек, поняв, что у роботов развилось человекоподобное сочувствие, помогает им найти утерянный секрет их воспроизводства, гарантирующий, что роботы наследуют Землю. Слово «робот» было произведено от чешского
Оставив в стороне страх перед восстанием машин, отметим, что появление своего рода свободы воли — или, по крайней мере, способности адаптироваться — необходимое условие для того, чтобы машины могли функционировать в сколько-нибудь реальной обстановке. Одним из первых, кто занялся этим вопросом, стал физиолог и робототехник Грей Уолтер, представивший в 1949 г. публике пару разработанных им автономных роботизированных черепах, которых он назвал Элмер и Элси.
Работа Уолтера началась как эксперимент по биомоделированию. Он построил своих роботов, чтобы разобраться в деятельности нервной системы у живых существ. Уолтер родился в 1910 г. в Канзас-Сити, изучал физиологию в Кембридже, затем занимался исследованиями в области нейрофизиологии. В 1935 г. он заинтересовался электроэнцефалографией — измерением электрической активности мозга. В последовавшие за этим несколько десятилетий ученый внес заметный вклад в эту область науки в качестве директора по физиологи в Неврологическом институте им. Бёрден в английском Бристоле.
В робототехнику его привело желание понять, как живой мозг реализует сложное поведение посредством своих компонент и взаимосвязей. Два сконструированных им черепахоподобных робота, Элмер — «Электромеханический робот» (ELectro-MEchanical Robot, ELMER) и Элси — «Электромеханический робот светочувствительный с внутренней и внешней стабильностью» (Electro-mechanical robot, Light-Sensitive with Internal and External stability, ELSIE), представляли собой, по существу, корпуса на колесах, каждый из которых был снабжен перископоподобным глазом. Число электрических компонент в каждой из черепах было очень небольшим: две радиолампы (играющие роль нейронов), одна из которых связана с датчиком света, а другая — с датчиком касания; два моторчика (один — для движения вперед, другой — для руления); и две батарейки. Вот описание самого Уолтера: «Число компонент в устройстве было сознательно ограничено двумя, чтобы понять, какую степень сложности поведения и независимости можно получить с минимальным числом элементов, соединенных в систему, обеспечивающую максимальное число взаимосвязей»{7}. Короче говоря, Уолтер предположил, что сложное поведение живых существ проистекает не столько из числа имеющихся нейронов, сколько из взаимосвязей и взаимодействий сенсорных органов и нейронов, и что довольно сложные реакции можно получить даже от «животного» всего с двумя нейронами.
Результаты экспериментов, по крайней мере тех, что Уолтер представил, произвели сильное впечатление. Светочувствительный «глаз» черепахи вращался до тех пор, пока не обнаруживал не слишком яркий источник света. Затем машина двигалась к этому источнику. Когда свет становился слишком ярким, машина переключалась в режим избегания света и отъезжала в сторону в поисках более гостеприимного места. Датчик касания, соединенный с корпусом, должен был заставить робота изменить курс после того, как было зафиксировано касание, что позволяло роботу в поиске источников света успешно объезжать небольшие стенки и даже зеркала. Что еще интереснее, у черепахи Элси была предусмотрена возможность подзарядки. Когда ее аккумуляторы разряжались в достаточной степени, способность избегать света снижалась, что заставляло робота искать более ярко освещенный участок, где автоматически включался процесс подзарядки.
Уолтер утверждал, что сложные и непредсказуемые движения черепахи напоминали нечто, похожее на свободу воли. В оправдание он сослался на философский парадокс, известный как история буриданова осла, который предложил в XIV в. французский философ Жан Буридан. В этом парадоксе голодного осла ставят точно посередине между совершенно одинаковыми копнами сена. Если осел — это просто механическое приспособление, то обе копны для него будут выглядеть одинаково приемлемыми, и, в принципе, осел умрет от голода, потому что не сможет выбрать ближайшую к себе, или «оптимальную», копну. Животное, обладающее свободой воли, следовало из рассуждений, без малейшего труда сделает этот, по существу произвольный, выбор.
Если Элмера или Элси поместить между двумя равноудаленными источниками света, то проблема решится почти тривиально, потому что светочувствительный датчик вращается в каком-то определенном направлении. Так что робот двинется к тому источнику света, который увидит первым. Это, по Уолтеру, есть механическая демонстрация того, как живые существа могли бы преодолеть парадокс: хотя источники света равноудалены в пространстве, во времени они разнесены, то есть наблюдаются в разные моменты времени. Проблема буриданова осла или, в более общем случае, проблема «застревания» роботов между множественными равножелаемыми целями может быть разрешена таким образом.