Загадка падающей кошки и фундаментальная физика
В большинстве этих последних работ, за исключением модели электрической кошки, акцент смещен с вопроса о том, как кошка умудряется все это проделать, на объяснение того, как получить тот же результат при помощи математики. Подразумевается, что кошка уже разобралась, как нужно переворачиваться оптимальным способом; теперь задача математика — разобраться, как математическими средствами можно было бы аппроксимировать этот процесс принятия решений, выведенный и отточенный эволюцией.
Переворачивание кошки в воздухе, судя по всему, самый хитроумный способ, посредством которого какое-либо животное самостоятельно возвращается в правильное положение; другие существа пользуются более простыми методами, которые к тому же исследованы учеными-робототехниками намного подробнее. Опубликованный в 2011 г. обзор способов возвращения в нормальное положение, принятых в животном мире, представляет четыре варианта, многие из которых мы уже видели{22}. «Модификация момента импульса до отрыва от земли» сравнима с первоначальным недостаточным объяснением, которое Максвелл и другие предлагали для падающей кошки: робот или животное могут подправить свой момент импульса и начать вращение еще до начала падения. «Изменение ориентации тела посредством движения конечности» отсылает к таким методам, как разработанный ВВС маневр «лассо»: вращая руками, можно закрутить тело в противоположном направлении. «Проворот тела без начального момента импульса» относится к тому переворачиванию, которое и проделывают кошки, в обоих вариантах — «сложись и крутись» и «подожмись и поворачивайся».
Четвертый метод, наименее, вероятно, желательный, является притом самым практичным: «переворачивание задним числом», то есть переворачивание в нормальное положение
Известно, что некоторые виды жуков (такие как
В каком-то смысле этот последний метод — дубль, двойная попытка: если жук приземляется на спину, он подбрасывает себя обратно в воздух и пытается приземлиться заново, уже в правильном положении.
Некоторые насекомые благодаря малой массе не нуждаются, судя по всему, в стратегии возвращения в нормальное положение. Исследования на личинках палочников показывают, что им, чтобы перевернуться, достаточно одних только аэродинамических сил; по существу, «ветер», который они чувствуют в падении, их и переворачивает{25}. Замечательно, что это явление очень похоже на то, что предлагал Антуан Паран в 1700 г. в качестве способа переворачивания для кошек. Хотя для кошек этот способ не годится, переворачивание некоторых видов насекомых он, по всей вероятности, описывает точно.
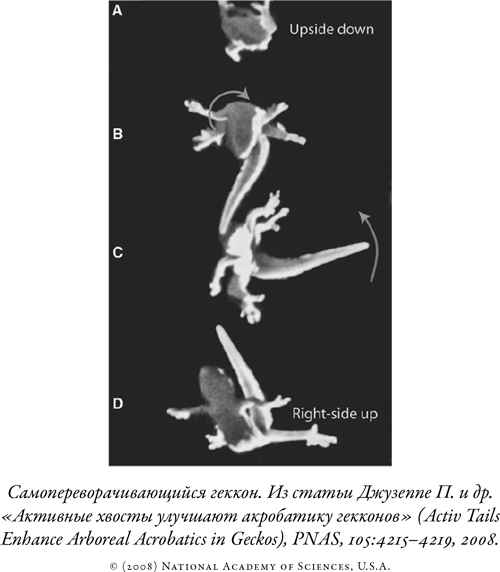
Другим животным анатомия позволяет использовать гораздо более простые стратегии переворачивания. Поскольку ящерица, к примеру, обладает хвостом, размер которого сравним с размером ее тела, она, чтобы перевернуть тело, может использовать стратегию «хвоста-пропеллера», которую первым предложил Джузеппе Пеано. В 2008 г. исследователи из Университета Калифорнии в Беркли проанализировали переворачивание плоскохвостого геккона
Эти существа — и роботы, созданные по их подобию, — могут пользоваться хвостом также и для управления в полете. В статье с величайшим, возможно, заголовком всех времен «Управление тангажем при помощи хвоста у ящериц, роботов и динозавров» (Tail-Assisted Pitch Control in Lizards, Robots and Dinosaurs) группа исследователей из Беркли изучила прыжки ящериц агама и использовала полученные данные для повышения стабильности прыжков роботов{27}. Робот, стартующий с платформы в стиле сериала «Придурки из Хаззарда», приземлится, скорее всего, головой вниз, потому что сила тяжести начинает тянуть переднюю часть робота, прежде чем его спина полностью покинет платформу. Однако, резко задрав хвост, робот (или ящерица) поднимает переднюю часть тела — опять же по закону сохранения момента импульса — и спокойно приземляется на живот. Кроме того, исследователи взяли свои результаты и палеонтологические данные, чтобы порассуждать об управлении тангажем у печально известного по кинематографу динозавра велоцираптора. Они отметили: «Несмотря на высказанные прежде предположения об ограничениях пассивных хвостов, небольшие тероподы с активными хвостами, такие как велоцираптор, возможно, были способны на воздушную акробатику даже более высокого класса, чем та, которую демонстрируют нынешние древесные ящерицы». Если велоцирапторы вас уже не пугают, представьте, что они преследуют свою добычу, как ловкие акробаты-паркурщики.
Хотя кошачий хвост в подобных маневрах куда менее эффективен, чем хвост ящерицы, экспериментальные исследования показали, что кошка тоже пользуется хвостом для равновесия{28}. Здесь вновь на сцену выходит высокоскоростная фотосъемка. Ученые снимали кошек, идущих по узкой балке, которую внезапно сдвигают в сторону. Видеосъемка показывает, что кошки при этом делают взмах хвостом, пытаясь уравновесить неожиданное движение.
Другие существа выработали в процессе эволюции еще более необычные методы управления тангажем, и эти методы также начинают использоваться в робототехнике. Обнаружено, что пауки-скакуны семейства
Чем дальше исследователи изучают движение животных, тем больше они обнаруживают различных методов самостоятельного переворачивания в воздухе. В статье, заголовок которой может, пожалуй, претендовать на второе место — «Воздушные маневры прыгающих лемуров» (Aerial Maneuvers of Leping Lemurs), — Дональд Данбар из Университета Пуэрто-Рико исследовал необычные способы смены ориентации в воздухе у кольцехвостых лемуров{30}. Лемур часто прыгает, находясь высоко на дереве лицом к стволу; при этом он способен перепрыгнуть на другое дерево и оказаться на нем тоже лицом к стволу. В этом случае лемур использует две стратегии: он начинает поворот, когда еще держится за дерево — «Модификация момента импульса до отрыва от земли», и подправляет при помощи хвоста свое вращение перед приземлением — «Изменение ориентации тела посредством движения конечности».
Даже крылатые существа пользуются необычными техниками самоориентации. В 2015 г. исследователи из Университета Брауна продемонстрировали, что очковые листоносы и более мелкие коротконосые крыланы при выполнении замечательно быстрых воздушных маневров управляют инерцией своих крыльев{31}. Эту стратегию можно рассматривать как аналогичную модели «подожмись и поворачивайся» у кошек, только роль двух половинок тела кошки здесь играют крылья. Если поджать одно крыло, то второе будет разворачивать тело мыши гораздо сильнее. Исследователи предполагают, что знание этой техники поможет расширить возможности и улучшить маневренность летающих роботов.
Но строились ли где-нибудь реальные физические модели роботизированных кошек? Еще в 1992 г. японские исследователи изучали модель переворачивания кошки типа «сложись и крутись» методами робототехники; возможно, именно их робот был первым реальным роботом, основанным на принципе падающей кошки. Оригинальная статья вышла на японском языке; в 2014 г. один из авторов, Такаси Кавамура из Университета Синсю, опубликовал краткое описание работы на английском языке{32}. Эта модель кошки немного напоминала механическую кошку Галли из двух цилиндров, соединенных гибкой перемычкой, но в ней использовалась активная схема управления. «Мышцы» представляли собой исполнительные устройства на пневматической тяге, что позволяло активно контролировать робота в свободном падении. Однако целью японцев было не создание универсального самопереворачивающегося робота, а всего лишь проверка гипотезы «сложись и крутись».
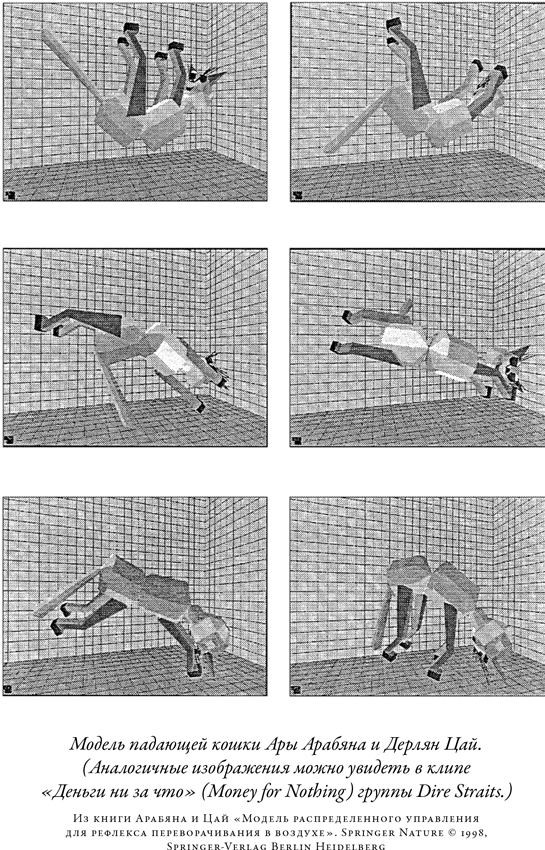
Большая часть работы по роботизированным кошкам относится к самому последнему времени и находится пока на начальных этапах — в основном, кажется, из-за трудностей с разработкой надежной управляющей системы. В 2013 г. исследователи из Аделаидского университета провели моделирование робота, имитирующего падающую кошку{33}. Столкнувшись с разнообразием предлагаемых стратегий переворачивания в воздухе, ученые австралийской группы решили сосредоточиться на разработке робота, способного воплотить оригинальную модель Марея «подожмись и поворачивайся». Их моделирование, которое вы можете здесь видеть, предсказывает переворот кошки немногим больше чем за полсекунды. Исследователи планируют построить работающий прототип.
В 2014 г. группа Карен Лю из Технологического института Джорджии сумела построить по образцу кошки робота, способного динамически подправлять свое положение в воздухе, чтобы принять нормальную ориентацию. Внешне этот робот не слишком похож на кошку. Он построен в виде трех соединенных шарнирами секций, которые способны сгибаться независимо друг от друга и управлять ориентацией по Кауфману, при помощи неголономного планирования движения. Их робот был не готов к скорости и ударам реального свободного падения, поэтому исследователи испытывали его в скольжении вниз по наклонной доске, с многообещающими результатами. Работа привлекла к себе внимание всей страны, хотя некоторые статьи представляли ее выводы с некоторой иронией: «Так что в далеком будущем, когда вы увидите, что со скалы на вас сверху прыгает ужасный робот, вы сможете сказать, что во всем виновата кошка»{34}.
В 2017 г. и другие группы добились значительного прогресса в задаче о падающей робокошке. В ходе совместного проекта исследователи из Британии и Ирана разрабатывали модели робокошек возрастающей сложности — из двух секций, затем из трех, затем из восьми — и проектировали для машины систему управления, которая избегала бы «сингулярностей», то есть умела бы обходить проблему буриданова осла. Постройка прототипа планируется{35}.
Стоит упомянуть также падающего робота, которого спроектировали Морган Поуп и Гюнтер Нимейер в лаборатории сети Disney Research в 2017 г.{36} Их машина вообще не похожа на кошку. Она выглядит как обвешанный схемами кирпич, называется подходяще — «Бинарный роботизированный инерциально управляемый кирпич» (Binary Robotic Inertially Controlled brick, BRICK) — и меняет ориентацию в воздухе согласно представлениям Максвелла. Кирпичу перед падением придается быстрое горизонтальное вращение, а далее он внутренне управляет своим моментом инерции и меняет тем самым скорость вращения. Ученым удалось показать, что такой робот способен самостоятельно менять ориентацию в достаточной степени, чтобы успешно пролететь сквозь отверстие в форме кирпича.
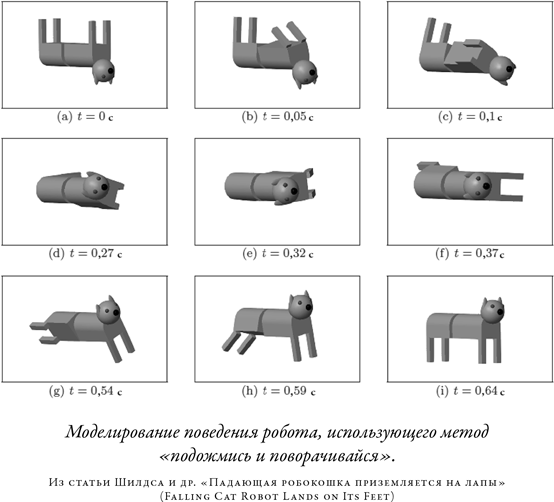
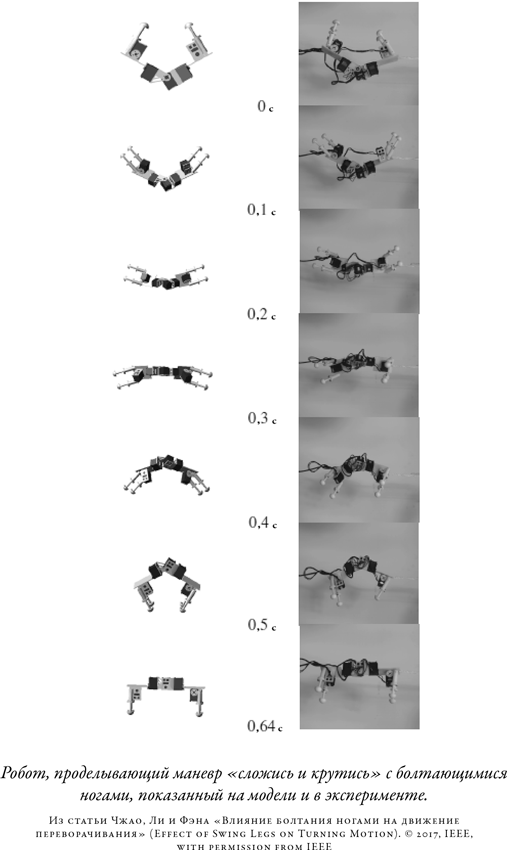
Первый, возможно реальный электронный прототип робота, имитирующего падающую кошку, внешне хотя бы отдаленно напоминающий кошку, построили три китайских исследователя — Цзясюань Чжао, Лу Ли и Баолинь Фэн{37}. Модель кошачьего переворачивания, которую они используют, основана в первую очередь на методе «сложись и крутись», но при этом ногам робота позволено свободно болтаться на шарнирах, чтобы оптимизировать движение. Сам робот, хотя и производит сильное впечатление, действует, судя по всему, по заранее прописанному жесткому алгоритму и не оценивает оптимальные для приземления движения на лету, как это делает реальная кошка. В робототехнике падающей кошки полное согласование математики и механизмов пока не достигнуто.
Обычные шагающие и бегающие роботы, однако, к настоящему моменту сделали резкий рывок в своем развитии. Начиная с 2013 г. компания Boston Dynamics разрабатывает гуманоидного робота по имени Атлас, обладающего поразительной степенью координации. Атлас — крупный образец, его рост составляет примерно 180 см, а весит он около 150 кг. В 2017 г. компания выпустила видеосюжет, в котором Атлас запрыгивает на ящики и даже делает сальто назад. Еще через год она выпустила видеосюжет, в котором Атлас бегает по траве и пересеченной местности. Как написал в сети один комментатор, «теперь робот Атлас компании Boston Dynamics сможет гоняться за вами по лесу»{38}. Если оставить в стороне апокалиптические прогнозы, то Атлас показывает, какой путь развития прошли роботы с того времени, когда «Данте II» безуспешно пытался выбраться из вулканического кратера на шести ногах. Тем не менее роботов не стали меньше бояться с тех пор, когда 100 лет назад на свет появился Геркулес, паровой родич Атласа.
Не каждый создаваемый в лабораториях робот представляет собой потенциальную угрозу человечеству. Инженеры копании по выпуску игрушек Hasbro сотрудничают с исследователями Университета Брауна, пытаясь усовершенствовать свои первоначальные разработки по созданию роботизированной кошки-компаньона по имени Доступный роботизированный интеллект для поддержки пожилых людей (Affordable Robotic Intelligence for Elderly Support, ARIES){39}. Этот робот, внешне похожий на кошку, умеющий мурлыкать и мяукать, подобно кошке, спроектирован как недорогой спутник и помощник для пожилых людей. ARIES обладает ограниченными двигательными функциями, имитирующими движения живой кошки: к примеру, он перекатывается на спину, чтобы ему почесали брюшко; кроме того, его можно запрограммировать так, чтобы он напоминал хозяину о необходимости визита к врачу и времени приема лекарств. Современные роботы, помимо всего прочего, могут обладать шерстью и иметь забавный характер — природные качества кошек.